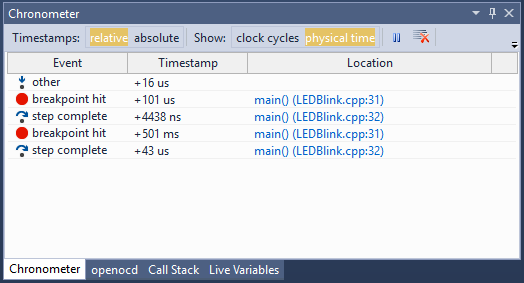
Today we are proud to announce the release of VisualGDB 5.3 Preview 8. This build mainly focuses on stability and usability improvements, such as better integration with Kinetis KSDK 2.x and support for importing Keil projects, however it also introduces a feature that greatly simplifies and reduces the overhead of analyzing precise timing of your embedded code – Chronometer.